Camera Setup Considerations¶
This topic shall help you to select a suitable camera model or camera configuration for you application. If you already are an Ensenso user this topic will guide you to efficiently use your Ensenso stereo 3D camera and setup the system for best reconstruction results.
Limitations of the 3D Reconstruction¶
Effective resolution for surface details¶
The Ensenso cameras operate a pattern projector in order to create artificial texture on homogeneous object surfaces. Accounting for the Nyquist-Shannon sampling theorem means that the projected pattern cells should be sampled by approx. 2.5 sensor pixels in each dimension. Likewise, the finest object surface details that need to be reconstructed should be sampled by approx. 2.5 pattern cells in each dimension. This results in an effective resolution of about 7 sensor pixels in each dimension for surface details. The effective resolution can be increased by capturing multiple images with shifted projected patterns using the FlexView technique in N35/X36/XR36 cameras. This significantly decreases the minimum feature size down to 5x5 or even 3x3 sensor pixels, depending on the number of captured images. The Ensenso camera selector presents the model-specific projected size of sensor pixels at all surface distances from the camera. You can use this to estimate the smallest feature size that you can reliably capture.

Minimum size of 3D features.
Note
Choose a model that fits your working area as tight as possible to maximize the spatial resolution on the object. This will then allow to reconstruct finer object details.
Reconstruction of curved and slanted surfaces¶
Surfaces that are observed with an acute angle below approx. 30° result in a distorted projector pattern and can in general not be reconstructed. This means that when a cylindrical object (e.g. a bottle) is observed, one Ensenso camera will only provide a 3D coverage of approximately 2/3 of the cylinder diameter. Therefore a setup of at least three Ensenso cameras would be required for a complete instantaneous 3D coverage of the cylinder surface. Note that the same applies to flat, strongly slanted surfaces (see illustration below). Selecting a model with a lower vergence angle (i.e. larger working distance) will reduce this effect at the cost of less z-resolution.
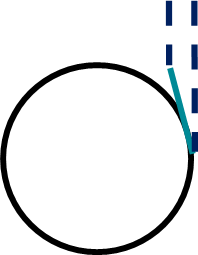
Stereo reconstruction will not work at acute viewing angles onto the object’s surface.
Slanted surfaces in outer field-of-view¶
Observing surfaces at steep angles is not favorable as mentioned above, so this must also be considered when imaging flat surfaces (e.g. cubes in a box). It is advised to position the Ensenso cameras high enough above the surface so that even in the outer field-of-view the surfaces are not viewed under an acute angle. This applies in particular to the wide-angle, short focal length models with large field-of-view (e.g., Ensenso N10-304-18, N20-602-16). Selecting a model with a larger working distance and lower vergence angle will again help to reduce these effects by making the viewing angles on the surface more obtuse.
Note
Consider sacrificing some z-resolution in favor of more complete surface reconstructions by selecting a model with lower vergence angle / higher working distance. This is especially important for complex scenes where objects will generate many shadowed areas.
Camera Position and Orientation¶
Reflective and transparent surfaces pose problems for optical measurements, thus also for the Ensenso system. Two main issues should be avoided:
Direct specular reflection from the projector into the cameras¶
The camera should not observe reflective surfaces under an angle close to 90° because the projector will cause specular reflection into the stereo cameras. It is recommended to rotate the camera around the baseline axis (the camera’s long axis) to reduce or eliminate these reflections.
In a multi camera setup such reflections can also arise from one camera’s projector into the other Ensenso cameras. In these cases the orientation of the Ensenso cameras should be chosen carefully to avoid the specular reflection. Alternatively the images can be taken sequentially to avoid reflections between different cameras.
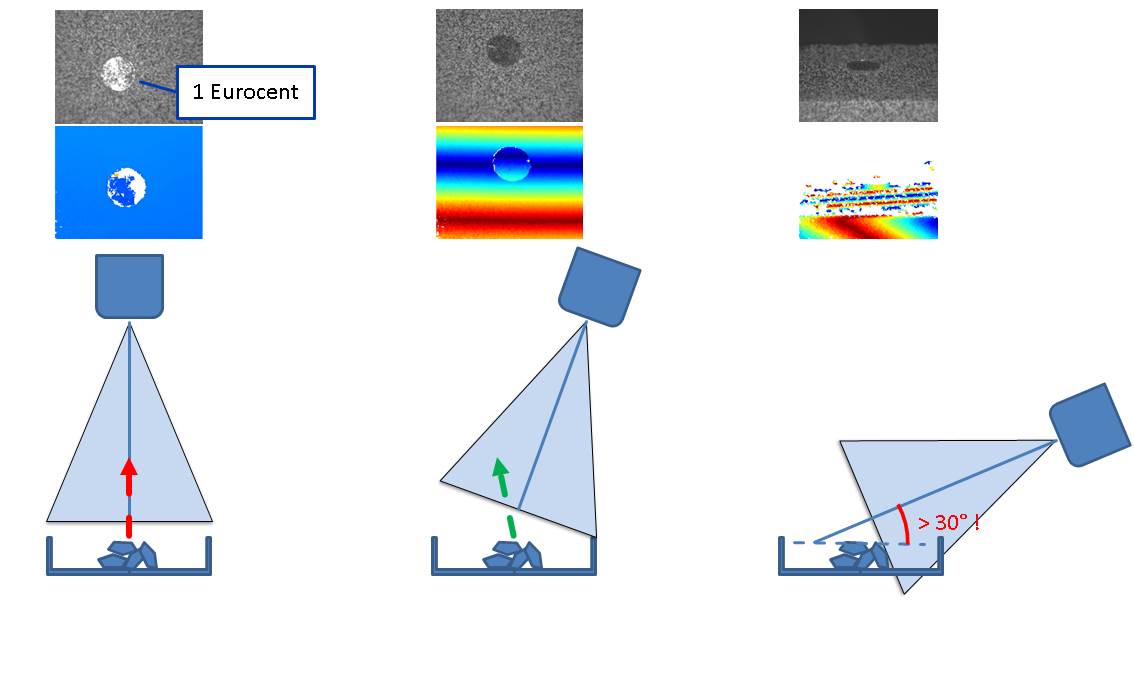
Effect of viewing angle in a single camera setup. Left: Specular reflection into the camera. Center: Recommended setup, light reflects away from camera. Right: Too acute observation angle, surface not reconstructed anymore.