Measuring Calibration Accuracy¶
For measuring the calibration accuracy, the camera must see a calibration pattern. The NxLib provides various error metrics to evaluate the accuracy of the camera’s calibration.
Note
The exact values and tolerances of the error metrics depend on the measurement volume of your camera. You should perform this test with a known good calibration to get reference values.
The accuracy of the calibration can also depend on the position in the camera’s field of view. For measuring, you should place the calibration pattern at a location where you normally capture 3D data. Ideally, you should also measure in multiple different locations.
Measuring Calibration Accuracy in NxView¶
Open the camera in the calibration wizard and select the menu option Measure Calibration. The resulting dialog will permanently capture images of the calibration pattern and show the error metrics.
You can use the same dialog to measure the accuracy of a link calibration between two cameras.
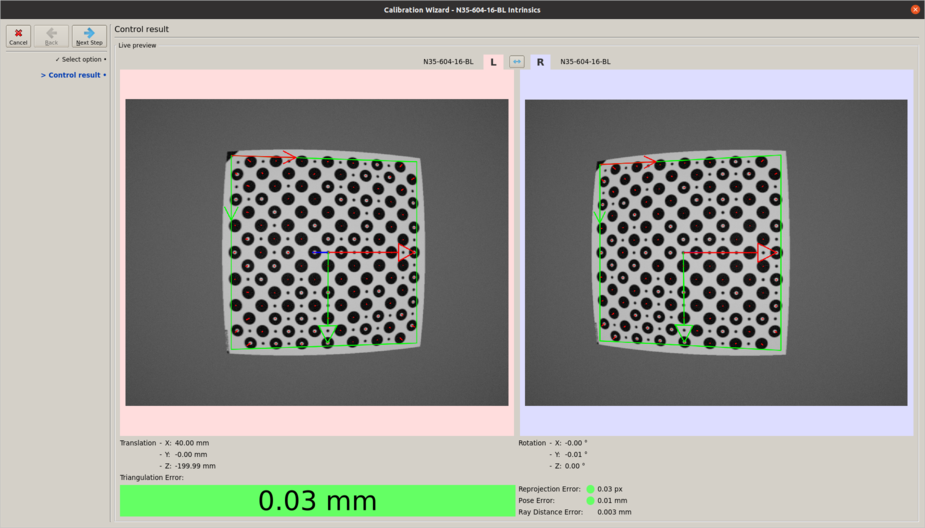
Calibration measurement dialog of the calibration wizard.¶
Measuring Calibration Accuracy with the NxLib¶
Collect an observation of the calibration pattern as described in this guide.
Execute the EstimatePatternPose command. Its result contains the values of the different error metrics described below.
Error Metrics¶
Metric |
Unit |
Description |
|---|---|---|
mm |
Maximum distance between a calibration pattern point and the intersection of the corresponding image ray with the calibration pattern. The distance is only measured along the x and y axes. This is usually the most stable and accurate metric for measuring the calibration error in 3D. |
|
mm |
Difference between pose estimates from the left and right camera. This is the most straightforward way to compute a 3D error and the results are comparable to the triangulation error in most cases. In some situations, this metric can be relatively unstable, so you should usually prefer the triangulation error. This is the only metric available for measuring the accuracy of a link calibration. |
|
mm |
Average distance of the rays when triangulating the observed pattern points from left and right camera. This metric is very stable, but cannot detect some types of calibration errors which affect the scaling of the camera’s coordinate system (e.g. errors in vergence angle, focal length and baseline). The values of this metric are not comparable to the other 3D metric (triangulation and pose error). |
|
px |
Distance between observed points and 3D points of the calibration pattern when reprojecting them into the images. This is the metric represented by the red error lines in the overlay images. Since it measures an error in the 2D image, its representation of errors possible in 3D is limited. You should prefer one of the 3D metrics to measure the accuracy of the calibration with a single number. |
|
px |
Shows misalignments in the rectified images, which can cause stereo matching to fail. If this error is high, it can usually be improved with a dynamic recalibration. |
Evaluating Measurement Results¶
For easier comparison of the measured errors, NxView colorizes them according to fixed thresholds. Note that the exact values and tolerances of the error metrics highly depend on the measurement volume of the camera and the situation that you are measuring in. The following values should therefore only be used as a rough guideline. Ideally, you should record the error values for a known good calibration and then compare future measurements from the same setup to this reference.
To reduce the dependency of the errors measured in mm on the camera’s measurement volume, we compare them to the diameter of the camera’s view field at the distance where the calibration pattern was observed.
mm Errors (relative to view field) |
px Errors |
Color |
|---|---|---|
< 1‰ |
< 0.25px |
Green |
< 2‰ |
< 0.5px |
Yellow |
< 4‰ |
< 0.8px |
Orange |
> 4‰ |
> 0.8px |
Red |
NxView mainly uses the triangulation error for evaluating the quality of the intrinsic calibration of a stereo camera. It is usually a good indicator for the overall quality of the calibration, but there are some errors that can be better observed in other metrics. For an optimal result you should therefore make sure that all of the available metrics have low values.
When inspecting the calibration visually, you should also watch out for any systematic distribution of the errors. In those cases, the calibration can almost always be improved with a recalibration even if the error metrics are already low. See this topic for some examples of systematic errors and how to handle them.