Multi Camera Setups¶
The NxLib provides a number of functions to simplify the usage of multi camera setups. Before cameras can be combined into a single capture system, they have to be calibrated together. To do this, you can use the calibration wizard that is contained in NxView. Simply select two cameras that you want to calibrate together and follow the instructions on the screen. After the calibration the relative position and orientation of the two cameras is known as a Transformation. NxView will ask you which camera you would like to use as the root of your LinkTree and set it as the target camera. The transformation is then saved as a Link from the second camera to the target camera in the EEPROM of the second camera.
Warning
In the link calibration procedure you can choose the trigger signals (see here for more details to the trigger definitions). It is not recommended to select the software trigger mode, because it can lead to poor calibration results within the link calibration procedure.
Example Setup¶
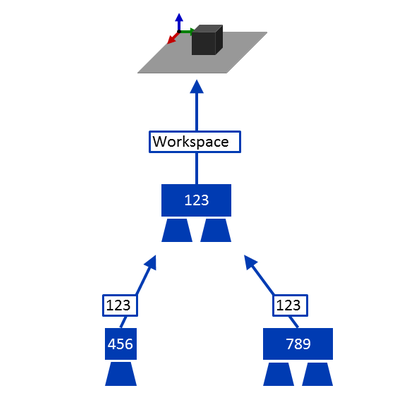
Assume you want to calibrate a capture system consisting of two stereo cameras (“123” and “789”) and one color camera (“456”). After mounting the cameras, you can first calibrate the two stereo cameras together, by selecting them in NxView and clicking the “Calibrate…” button. We decide that the resulting link should be stored in the stereo camera with serial number “789” by selecting “123” as the root of the LinkTree. We then calibrate the color camera “456” against the stereo camera “123” in the same way so that the calibrated link is stored in the color camera. When we open all three cameras together, we can additionally perform a Workspace Calibration. NxView then automatically decides to store the “Workspace” link in the camera “123”, as it is the only camera with an empty link and thus the current root. The resulting LinkTree looks as shown in Figure 1.
|
|
Figure 1: Resulting link tree of the example setup. |
Figure 2: Point cloud merging in the “Workspace” coordinate system. |
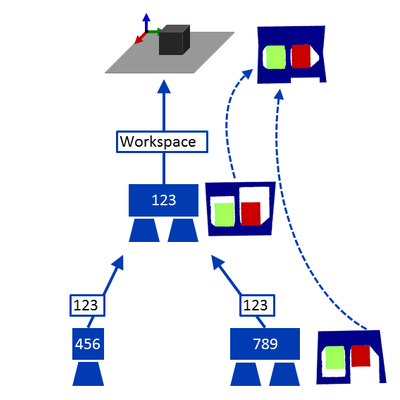
When capturing point clouds with the stereo cameras, each point cloud is automatically transformed into the world coordinate system, which in this case is “Workspace”. Since all your point clouds live in the same coordinate system, they can be combined by simple merging as illustrated in Figure 2. More information on the NxLib transformation system can be found in the LinkTree topic.