NumberOfDisparities¶
The number of disparities in pixels where correspondences in the stereo image pair are being searched, starting at MinDisparity. The resolution reductions by Scaling and Binning are automatically accounted for. The actual value used in the matching process is output in ScaledNumberOfDisparities .
Note
When using the PatchMatch Method this parameter has no effect.
Format
Number |
An integer specifying the number of disparities in pixels where the images are being matched. |
Note
The NumberOfDisparities parameter must be a multiple of 16.
Default
128
Example
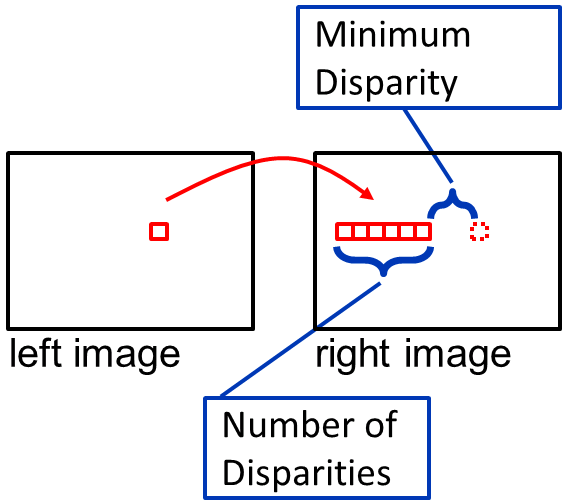
In the illustration below the search range for a pixel in the left image is shown. The MinDisparity parameter describes the offset of the search range, whereas the NumberOfDisparities parameter indicates the length of the search range in pixels in the rectified images.