ShadowingThreshold¶
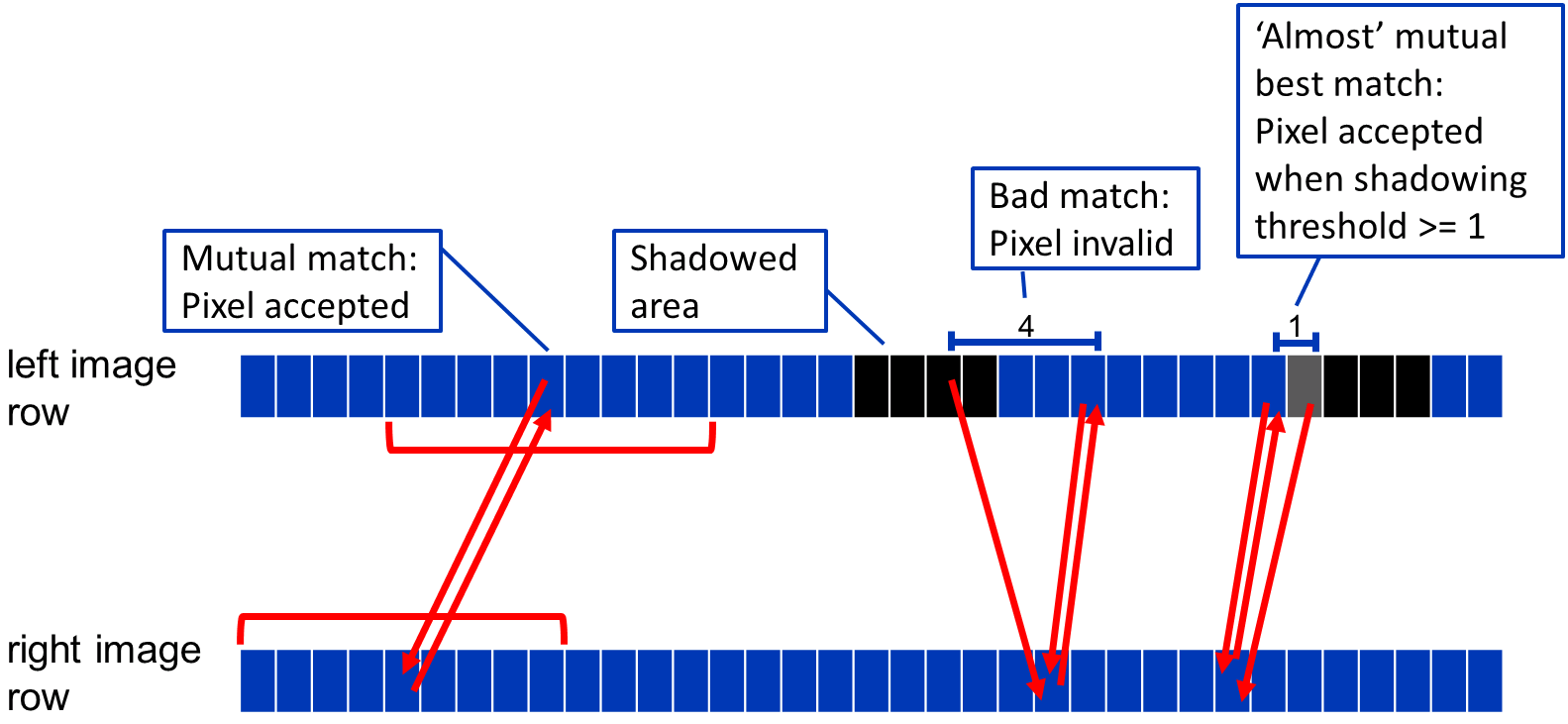
The disparity map is checked for occluded pixels. This is usually called ‘left-right consistency check’. A pixel is only accepted if it is a mutually best match with the assigned right image pixel. Due to subpixel interpolation and half-occluded pixels, it is reasonable to allow small deviations from ‘exact mutual’ matches. This threshold sets the allowed range of mismatch in pixels.
Format
Number |
An integer specifying the threshold in disparities by which a pixel might be occluded by another pixel to still be accepted as valid. Negative values disable the occlusion detection and will leave wrongly associated regions in occluded image areas. |
Default
2
Note
Setting a negative value (e.g. -1) for this parameter will disable filtering of shadowed areas. This will leave arbitrary depth values in shadowed areas.
Example
The image below shows a few associations between two corresponding rows of the left and right image. Black areas are occluded and do not have a corresponding pixel in the other image.