ValidRegion¶
Specifies the region of pixels in the disparity map, that could potentially be triangulated with the current MinDisparity and NumberOfDisparities settings. The pixel at LeftTop and RightBottom are both included in the valid image region.
Format
Object |
A parameter sub tree. Please refer to the description of the sub nodes for further information. |
Example
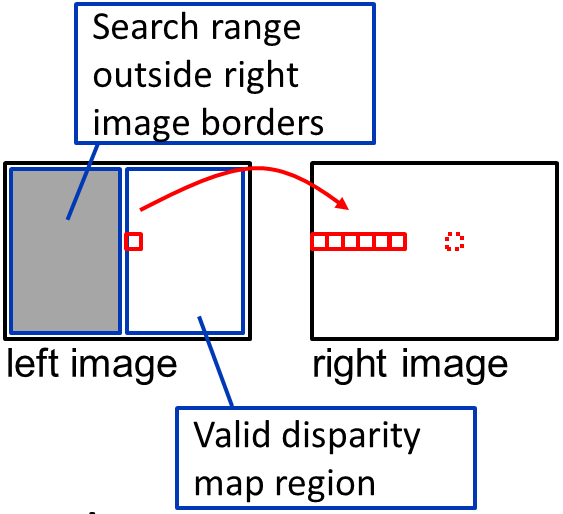
Depending on the settings for the disparity search range, some areas of the disparity map cannot be filled, because the corresponding range is not completely contained in the right image. The ValidRegion node specifies the corner pixels of the valid area in the disparity map as illustrated below: